

Currently, with the COVID-19 virus outbreak, most patients in hospitals across the world are at high risk of getting seriously ill with the virus. Patients with weak immune systems, pre-existing conditions, and old-age are advised to avoid contact with other people as much as possible and take precautions.

Nurses, doctors, and other general admin hospital staff are the potential carriers of COVID-19 since they are exposed to a whole variety of patients with different illnesses and in some cases are in direct contact with COVID-19 patients.
But, patients in hospitals still need to be cared for and be provided services without the risk of exposing them to the virus.
That’s where robots come in.
Intelligent robots are particularly helpful given they reduce the chances of virus transmission that may happen from one person to another and especially at high risk of infection facilities like hospitals.
They limit patients’ contact with potential COVID-19 carriers.
Intelligent robots are also helpful since they allow basic hospital services to continue. For instance-
- delivering medicines
- checking body temperatures (up to 10 people simultaneously)
- decontaminating rooms
- taking out garbage
- taking out biohazard waste in hospitals
- delivering meals
- delivering hospital clothes and accessories






A typical sequence and high-level system architecture of such mobile robots:

Above is an example of a sequence diagram that is used in some of the intelligent robots used in hospitals.
Example of this sequence. When the patient/doctor makes a request (bring milk), the Planner in PEIS calls ROS’s approach refrigerator function which then uses Navigation and Localization modules in MIRA, then the detect object function, then grasp object function. After grasping the object, in this case, milk for the patient, the planner then approaches the user using the Navigation and Localization modules in MIRA.
For context:
ROS: Robot operating system is a compilation of tools and libraries that are used by robots across the world. It is NOT an actual operating system.
PEIS: Physically Embedded Intelligent Systems (eg. sensors, actuators, cameras, etc.)
MIRA: Middleware for Robotic Applications: It is a cross-platform framework written in C++ that provides middleware and tools for building software modules (src: Mira official site)
Middleware: Software that serves as a bridge between an OS/database and its applications.
CogniDrive: Software built by MetraLabs that has components for mapping the environment, localization, path planning, and collision avoidance. This software helps the mobile robot reach its destination.
Different types of mobile bases seen on such robots
Top 3 commonly used mobile platform bases:
Dingo D from Clearpath robotics

This is light (weighing only 9kg) and has a differential drive. ROS comes installed with Dingo. It comes with a payload mounting system and can take a maximum payload of 20kg! Given the mounting option, it is strategically designed to be a base.
Pioneer P3-DX mobile robot

Given its chassis is made out of lacquered aluminum, it is one of the lighter mobile platform robots. It has a differential drive and is quite reliable. It has a rotation speed of 300 degrees a second and top speed of 1.2m/s which is ideal for facilities with high traffic eg. hospitals!
Scitos

Built by MetraLabs in Germany, Scitos is one of the popular mobile bases with a differential drive. As from the picture you can see the base is covered with ultrasonic sensors. This robot base has a long run time of 18hours and a charge time of 6 hours. Longer run times are ideal for hospitals given the requests from patients and doctors on their long shifts.
Different types of robot arms seen on such robots
Robot arms are used to pick tubes/samples, meals, blankets, etc. and transport them from storage to all the different patients in the hospital.
Powerball Lightweight Arm LWA 4P

This lightweight robot arm from Schunk allows for 8 hours of operation without charging. It has high torque and also great for tasks that require speed and accuracy.
LBR iiwa (intelligent industrial work assistant)

This robot arm from KUKA robotics is a high-performance robot arm with sensors that are sensitive to any contact made. This is a great robot arm when it comes to its interactions with humans as there are no potential hazards when in contact with this robot. With a payload capacity for 7kg, this arm can handle hospital accessories, meals, etc.
CR-7iA-L

This is a 6 axis robot from FANUC. It is commonly used alongside human workspaces and can carry a payload of 7kg which is ideal for picking up meals, robes, medicines, samples, etc.
JACO

This robot arm manufactured from Kinova. Although this one can’t carry much payload (only 1.5kg) it is one of the safest arms that can be around humans. The 3 fingered end effector you see at the end is great for picking up small items around the hospital like apples and tubes.
Different types of sensors seen on such robots
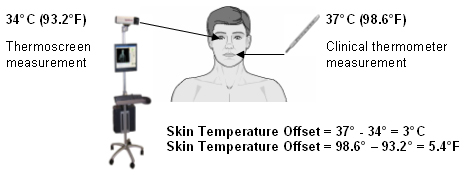
Infrared Thermal Detection System/Body Temperature Detector:
Such detectors can pick up temperatures of multiple people. They are meant to be sensitive and detect the difference between standard body temperature of 96.8F (36 celsius) to those with fever (38–39 celsius) 100.4 F and above.
Further, detectors account for skin offset. Skin offset is the offset between the temperature of the skin versus the internal body temperature. This offset is due to the insulating effect of the skin!
TVS-200IS/TVS-500IS

This has an accuracy of ±1.0°C and can detect body temperatures between -10 to 60°C.
Wahl Fever Alert Imager HSI2000S

This Wahl device has an accuracy rate of ±2°C from +20°C to +50°C and ±5°C ± 5% from -10°C to +150°C.
FLIR ThermoVision A20M

FLIR has an accuracy rate of ±2° and can operate within the range -4 to +482° F (-20° C to +250° C). This device is plug and play and has an intelligent alarm setup that can go off as soon as it detects persons with a high fever.
OptoTherm Infrasight IS640

Optotherm provides a turnkey solution with 0.05°C sensitivity; 0.3°C accuracy. This is one of the most reliable products available in the market!

Cameras for object detection
The most common cameras for object detection are
Pixy

Pixy is one of the most affordable cameras available in the market with inbuilt algorithms for object tracking and recognition
Presenceplus Proii Camera

Built by BANNER ENGINEERING CORP. this camera is a compact camera that can be mounted even if there is less space available on the robot. This camera is often used for object detection, pattern recognition, etc.
PixeLINK
![]()
This is one of the higher-end cameras used for object detection. This has a resolution of 6.6 MegaPixel.
RGB-D Sensors and Gesture sensing
Xtion Pro

This plug and play sensor is used for detecting humans in the hospital. A 3D point-cloud is generated using this. This sensor is also used for human gesture detection and for voice control.
Microsoft Azure Kinect DK

Microsoft Kinect is a popular choice among many robot researchers. This is used for human detection (body skeletal detection), speech recognition and gesture recognition.
Laser scanners
W1005N(I) Anti-Collision LiDAR

You might have LIDARs like this mounted in a lot of robots. This particular one is a popular choice for automated ground robots. It allows for a 5m detection range within 270 degrees.
HPS-3D160 Solid-State LiDAR

This LIDAR measures range up to 15m with a field of view: 76° x 32°.
Germicidal UV lights
Coleparmer UV light

Such UV lights are often mounted in packs of 6 on robots and are used to decontaminate a room full of germs. The process takes about 20–30 minutes. Such light even bounces of walls to go on the back surfaces of any medical equipment in the room.
Main algorithms often used by such service ground robots
SIFT algorithm

The SIFT algorithm within OpenCV is used in most of the ground robots for object detection. These algorithms detect a multitude of objects in a hospital that the robot might need to grasp- meals, blankets, tubes, etc.
SLAM

SLAM or simultaneous localization and mapping (SLAM) is used by robots to create a map of their surroundings and knowing where they are located in that map. There are several SLAM algorithms: kf-slam, rbpf-slam, icp-slam
The most commonly used SLAM algorithms
- Rbpf-slam: Rao-Blackwellized particle filter (RBPF) is one of the main ways SLAM is now done.
- Iterative closest point (ICP). This SLAM algorithm is only suitable for 3D and 2D laser scanner not 1D or sonar
So at the end of the day
If you see yourself pursuing robotics this article gives you an understanding of intelligent service robots seen in hospitals.
The service robotics industry is currently taking off and there will be a higher demand for people with robotics background for years to come. Service robots save lives in times of a virus outbreak, so such a career will be a rewarding and meaningful one!
It is intelligent service robots like these that will be at the frontlines of humanity’s fight against COVID-19 and any other future virus outbreaks!